Current Research work
1. Mars Entry Descent and Landing
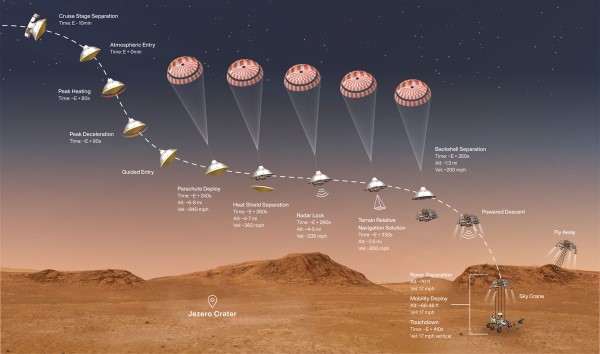
The Mars Entry, Descent, and Landing (EDL) sequence must be executed with perfect harmony and precision to safely land spacecraft on the surface of Mars. Our lab focuses on designing guidance and control algorithms to safely navigate the spacecraft through the Martian atmosphere from the point of entry to touchdown. The EDL sequence is divided into three phases, namely, the entry phase, the parachute phase, and the powered descent phase. Currently, we are working on designing computational guidance and control algorithms for the Entry and the Powered descent phase. The entry phase begins when the spacecraft first enters the Martian atmosphere at a velocity of around 6 km/sec and an altitude of roughly 125 km above the surface of Mars and ends with parachute deployment. Various path constraints such as dynamic pressure, heat rate, and aerodynamic loading need to be maintained within their respective bounds. Terminal constraints on terminal altitude, final downrange, and crossrange also need to be achieved. Maximizing the terminal altitude while achieving the desired terminal velocity opens up the possibility of landing at scientifically interesting Landmarks that lie on a higher elevation plane. Achieving the above objectives requires solving computationally intensive non-linear optimal control problems. To solve such problems in a computationally efficient manner, our current approach comprises of combining pseudo-spectral methods along with the constrained Model Predictive Static Programming (MPSP) algorithm to develop real-time guidance techniques.
2. Dynamic Modelling and Optimal Management of Air Traffic Over Airspace of India
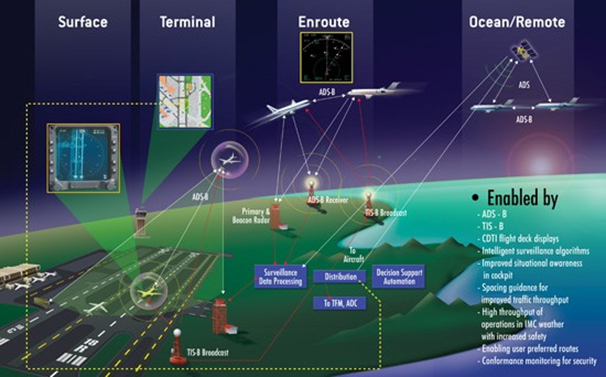
Ref : https://thepointsguy.com/2017/06/air-traffic-control-privitization/
3. Autonomous Navigation of UAVs Using Optimal Guidance and Control Using Artificial Intelligence.
Ensuring high-precision autonomous navigation, especially in outdoor and unknown environments, is still a massive challenge for real missions. In addition, the UAVs also encounter significant wind disturbances, making the task of precision navigation substantially challenging. In addition to these, for collision avoidance and successful recovery, situational awareness is a must, which needs to be done in real-time. The research aims to develop techniques involving optimal guidance and control and artificial intelligence to achieve precise autonomous navigation in drones in complex settings like navigation in outdoor and unknown environments, takeoff, and landing on a moving platform. The techniques developed will be experimentally demonstrated using in-house developed drones such as quadrotors and VTOLs.

{kind=link}
4. Artificial Pancreas For Type-1 Diabetes Patients Of India
Type 1 Diabetes Mellitus (T1DM) is a condition characterized by the body’s inability to produce insulin due to autoimmune destruction of the pancreatic beta cells. In the absence of insulin the glucose in the blood cannot be converted to energy by the cells in the body. Hence, T1DM patients depend upon exogenous insulin for regulating their blood glucose levels.
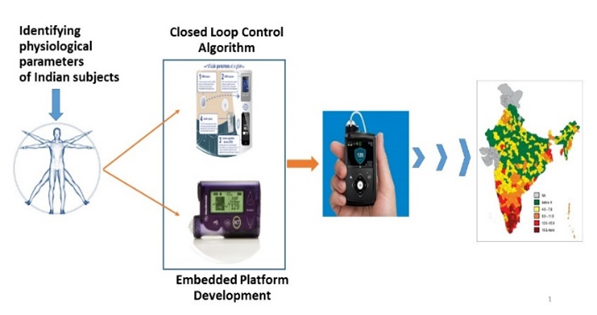
At present, a majority of the T1DM patients manually inject exogenous insulin by monitoring their glucose concentrations throughout the day. Our project aims at developing an Artificial Pancreas System in order to automate the exogenous insulin infusion process. The closed loop system would use the glucose concentrations obtained from continuous glucose monitoring sensors as input to calculate the required insulin dosage.
These estimated physiological parameters for Indian subjects will help customize the glucose-insulin model for Indian population. The mathematical model customized for Indian population will then be used for developing a glucose control feedback loop to determine the insulin dosage required. Advanced control strategies such as variants of model predictive control which predicts the glucose trajectory in the future for given insulin input. The mathematical model does not exactly replicates the glucose insulin dynamics as in human body, therefore there are many unaccounted variations which needs to be taken care of, and this will be done using neuro adaptive control. Finally arriving at most suitable algorithm for artificial pancreas system. The control algorithm will then be embedded on a cost effective insulin pump that is being indigenously developed at IISc. The final closed loop system will comprise of a CGMS that wirelessly transmits glucose reading to the control algorithm embedded on the insulin pump.
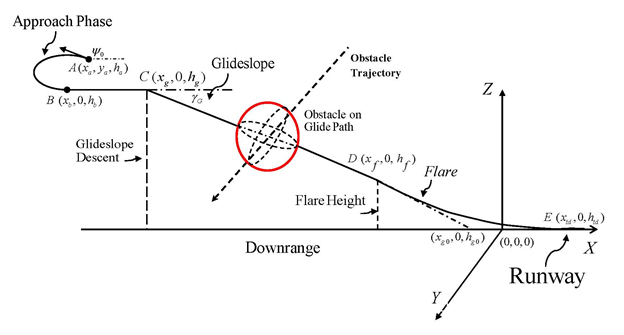
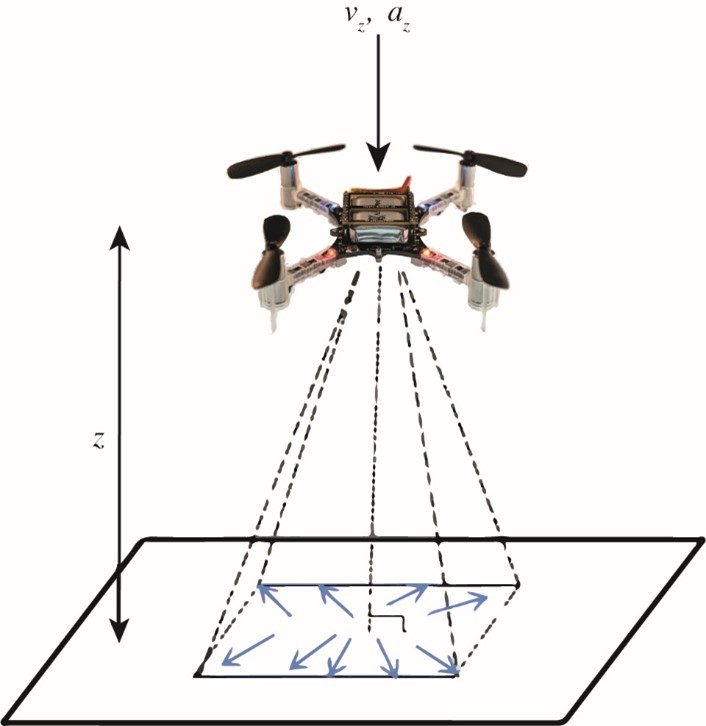
5. Robust Adaptive Control System for Autonomous Vertical Landing of Quadrotors
The autonomous landing of an unmanned aerial vehicle (UAV) is required to be fail-safe in many unprecedented critical scenarios. Therefore, developing autonomous landing technologies is a valuable task. For this purpose, one of the promising vision-based techniques is based on the divergence of optical flow fields. Optical flow fields are the characteristic patterns of time-dependent visual motions that are a rich source of visual cues and contain information about relative speed and the proximity of the vehicle with respect to the obstacles in the surrounding environment. The iterative image registration technique can estimate general optical flow fields from local image regions without any a priori knowledge of the structure of the whole scene, hence without image segmentation. It has been found that the honeybees keep flow divergence constant to reduce their speeds to almost zero at touchdown. Inspired by this conclusion, a robust adaptive control system has been developed for a constant optical flow divergence-based soft landing of the fully autonomous quadrotor aerial vehicle onto a stationary landing platform.
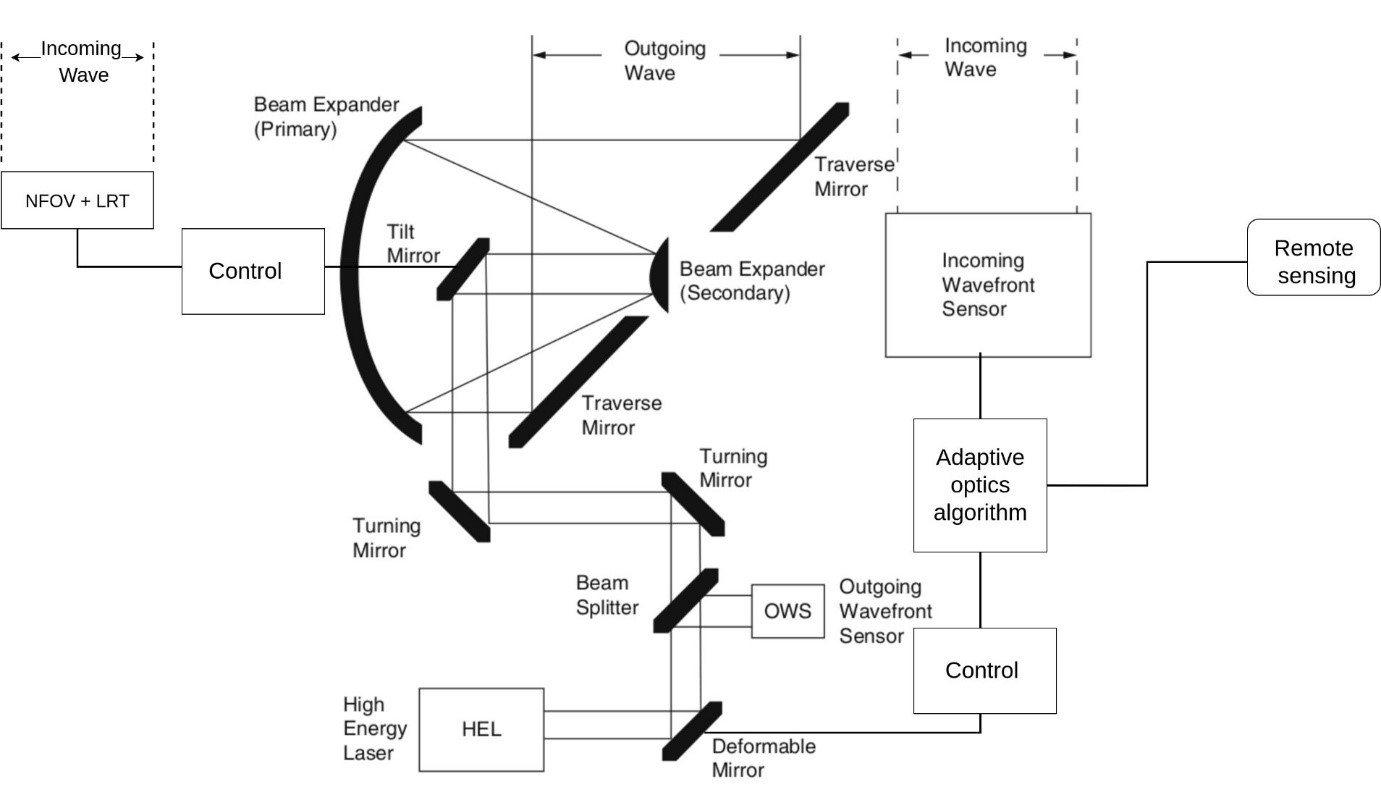
6. High-Precision Pointing Control of Laser Beams
High-power laser beams can be used as powerful weapons for nullifying targets (typical anti-drone applications). For it to be effective, however, a strong requirement is that it must continuously fall on a specific location of the target for a finite amount of time (called as “dwell-time”). Because of this, when the target is usually at a far-away location, the pointing accuracy requirement becomes of the order of a few microns (micro radians). Moreover, since the beam travels through the air medium, it is subjected to a host of disturbance effects such as jittering, splitting, bending etc., which are functions of humidity, temperature, wind condition, distance of travel, and so on. Such disturbance effects must be rejected by the system.
The mechanism that helps achieve this objective involves both coarse correction by swivelling (turning) the entire setup and fine correction by actuating a set of fast steering mirrors. In order to actuate the FSM a State constrained Neuro adaptive based control approach is needed to mitigate the effects of modelling uncertainties and disturbances.